

Forest and Grassland Resources Research ›› 2024›› Issue (2): 92-100.doi: 10.13466/j.cnki.lczyyj.2024.02.011
• Technical Application • Previous Articles Next Articles
LI Wei( ), WANG Xiaohong()
), WANG Xiaohong()
Received:2023-10-25
Revised:2024-01-22
Online:2024-04-28
Published:2024-09-02
Fig.1
Location of the Study Area

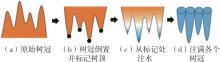
Fig.2
Principle of marker-controlled watershed algorithm

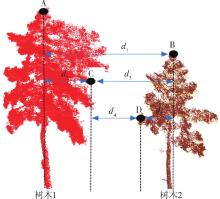
Fig.3
Principle of distance-based clustering algorithm


Fig.4
Fusion effect of sample plot

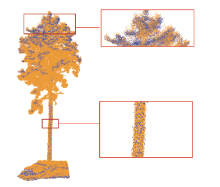
Fig.5
Detailed view


Fig.6
Segmentation effect of different interpolation methods at different raster resolution

Tab.1
Segmentation accuracy of different interpolation methods at different raster resolution
| 插值方式 | 指标 | CHM栅格分辨率 | |||
|---|---|---|---|---|---|
| 0.3 m× 0.3 m | 0.4 m× 0.4 m | 0.5 m× 0.5 m | 0.6 m× 0.6 m | ||
| 反距离权重 | r | 1.00 | 0.97 | 0.85 | 0.73 |
| p | 0.47 | 0.70 | 0.88 | 0.87 | |
| F | 0.64 | 0.81 | 0.86 | 0.79 | |
| 克里金 | r | 0.99 | 0.96 | 0.82 | 0.70 |
| p | 0.45 | 0.62 | 0.85 | 0.85 | |
| F | 0.62 | 0.75 | 0.83 | 0.77 | |
| 不规则三角网 | r | 0.97 | 0.96 | 0.77 | 0.70 |
| p | 0.45 | 0.65 | 0.85 | 0.83 | |
| F | 0.61 | 0.77 | 0.81 | 0.76 | |
Tab.2
Segmentation accuracy of different distance thresholds
| 距离阈值/m | 分割精度 | ||
|---|---|---|---|
| r | p | F | |
| 1.85 | 0.85 | 0.43 | 0.57 |
| 3.97 | 0.82 | 0.64 | 0.72 |
| 5.50 | 0.75 | 0.66 | 0.70 |
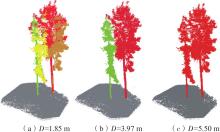
Fig.7
Segmentation details for different distance thresholds

Tab.3
Segmentation accuracy under different layer thicknesses
| 层厚度/m | 分割精度 | ||
|---|---|---|---|
| r | p | F | |
| 0.2 | 0.72 | 0.69 | 0.70 |
| 0.5 | 0.75 | 0.73 | 0.74 |
| 1.0 | 0.71 | 0.51 | 0.60 |
Fig.8
Accuracy evaluation results of single tree segmentation
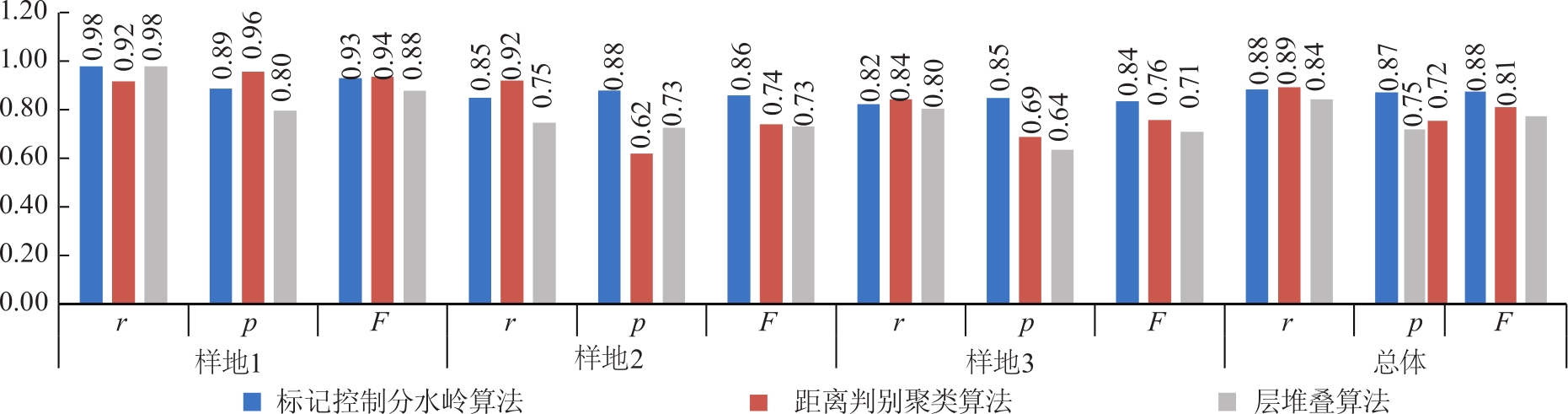

Fig.9
Linear regression results between extracted tree height and measured tree height

| [1] | SZULECKA J, ZALAZAR E M. Forest plantations in Paraguay:Historical developments and a critical diagnosis in a SWOT-AHP framework[J]. Land Use Policy, 2017,60:384-394. |
| [2] | 陈浩. 马尾松林分质量评价研究:以石阡县与印江县国家储备林为例[D]. 贵阳: 贵州大学, 2022. |
| [3] | 朱泊东, 罗洪斌, 金京, 等. 高郁闭度人工林无人机激光雷达单木分割方法优化[J]. 林业科学, 2022, 58(9):48-59. |
| [4] | 乔俊峰, 周沅桢, 王永, 等. 三维激光扫描测体积技术及其应用进展[J]. 激光与红外, 2021, 51(9):1115-1122. |
| [5] | 王鑫, 潘华志, 罗胜, 等. 机载激光雷达测深技术研究与进展[J]. 海洋测绘, 2019, 39(5):78-82. |
| [6] | 王子斐. 基于手持式移动激光雷达的近自然经营林分结构特征及变化研究[D]. 上海: 华东师范大学, 2021. |
| [7] | ZHAO Dan, PANG Yong, LI Zengyuan, et al. Isolating individual trees in a closed coniferous forest using small footprint lidar data[J]. International Journal of Remote Sensing, 2014, 35(20):7199-7218. |
| [8] | 惠振阳, 李娜, 程朋根, 等. 基于连通性标记优化的地基LiDAR点云单木分割方法[J]. 中国激光, 2023, 50(6):147-155. |
| [9] | AYREY E, FRAVER S, KERSHAW J A, et al. Layer stacking:A novel algorithm for individual forest tree segmentation from LiDAR point clouds[J]. Canadian Journal of Remote Sensing, 2017, 43(1):16-27. |
| [10] | YAN Wanqian, GUAN Haiyan, CAO Lin, et al. A self-adaptive mean shift tree-segmentation method using UAV LiDAR data[J]. Remote Sensing, 2020, 12(3):515. |
| [11] | ZHAO Xiaoqian, GUO Qinghua, SU Yanjun, et al. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016,117:79-91. |
| [12] | 袁志聪. 基于Harris特征的点云配准方法研究[D]. 南昌: 东华理工大学, 2019. |
| [13] | 林榆森, 李秋洁, 陈婷. 基于快速点特征直方图的树木点云配准[J]. 中国农机化学报, 2022, 43(2):155-162. |
| [14] | 刘翔宇, 王健, 王效盖, 等. 基于3DSIFT特征点的改进ICP点云配准算法[J]. 应用激光, 2023, 43(11):153-160. |
| [15] | LIU Li, LIM S, SHEN Xuesong, et al. A hybrid method for segmenting individual trees from airborne lidar data[J]. Computersand Electronics in Agriculture, 2019,163:104871. |
| [16] | 胡迎香, 高红旗, 夏万求, 等. 机载雷达点云亚热带针叶林单木分割探究[J]. 应用激光, 2021, 41(6):1301-1309. |
| [17] | LIU Kun, SHEN Xin, CAO Lin, et al. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations[J]. ISPRS Jouranalof Photogrammetry and Remote Sensing, 2018,146:465-482. |
| [18] | PARIS C, KKLBE D, VAN AARDT J, et al. A novel automatic method for the fusion of ALS and TLS LiDAR data for robust assessment of tree crown structure[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(7):3679-3693. |
| [19] | 黄洪宇, 骆钰波, 唐丽玉, 等. 基于单木位置特征的多源树木三维点云配准方法[J]. 林业科学, 2022, 58(11):96-107. |
| [20] | LIU Qianwei, WANG Jinliang, MA Weifeng, et al. Target-free ULS-TLS point-cloud registration for alpine forest lands[J]. Computers and Electronics in Agriculture, 2021,190:106460. |
| [21] | 苟丙荣. 联合地基LiDAR与无人机LiDAR的白桦蓄积量反演研究[D]. 兰州: 兰州交通大学, 2021. |
| [22] | 段祝庚, 肖化顺, 袁伟湘. 基于离散点云数据的森林冠层高度模型插值方法[J]. 林业科学, 2016, 52(9):86-94. |
| [23] | 魏金龙, 李明阳, 赵邑晨, 等. 基于稀疏型机载激光雷达数据的风景林参数估测[J]. 西北林学院学报, 2021, 36(2):164-171. |
| [1] | LUO Yaopei, LI Heping, YANG Guangbin, CEN Gang, LI Man, CAO Qianyang, WANG Renru, CHEN Panfang. Volume Estimation Method of High Canopy Density Pinus massoniana Forest Based on UAV Image [J]. Forest and Grassland Resources Research, 2024, 0(2): 68-79. |
| [2] | TANG Jiajun, WANG Gang, CHAI Zongzheng. Single-TreeVolume Estimation of Pinus massoniana based on Airborne LiDAR Point Cloud [J]. Forest and Grassland Resources Research, 2023, 0(6): 105-112. |
| [3] | YANG Shenjun, TAN Wei, CHEN Xinyu, TANG Jiajun, YANG Zejun, WU Yujie. Study on Stand Spatial Structure of Typical Pinus massoniana Mixed Forest in Liping County of Guizhou Province [J]. FOREST RESOURCES WANAGEMENT, 2023, 0(3): 105-114. |
| [4] | LI Cheng, TANG Daisheng, JIA Jianbo. Estimation of Pinus massoniana Index Based on Geostatistical Spatial Analysis [J]. FOREST RESOURCES WANAGEMENT, 2023, 0(3): 128-133. |
| [5] | ZHANG Min, WANG Jian, HAN Tianyi, OUYANG Xunzhi, PAN Ping, LIU Dongdong. Characteristics of Carbon Density and Its Influencing Factors of Pinus massoniana Forest Based on CBM-CFS3 Model [J]. FOREST RESOURCES WANAGEMENT, 2022, 0(6): 44-53. |
| [6] | HE Peng, CHEN Zhenxiong, LIU Xianzhao. Developing Stand Basal Area Growth Models for Pinus massoniana and Cunninghamia lanceolata in Hunan Province [J]. FOREST RESOURCES WANAGEMENT, 2021, 0(5): 56-61. |
| [7] | WANG Yihe. Analysis on Effect of Inter-planting Broad-leaved Trees on Quality Improvement of Pinus massoniana Stand in Soil Erosion Area —A Case Study in Changting,Fujian Province [J]. FOREST RESOURCES WANAGEMENT, 2020, 0(6): 116-122. |
| [8] | SUN Zhongqiu, WU Fayun, HU Yang, GAO Xianlian, Gao Jingping. Determination and Estimation of Pinus massoniana Stand Volume and Saturation Point Based on Landsat-8 OLI Data [J]. FOREST RESOURCES WANAGEMENT, 2020, 0(6): 135-142. |
| [9] | CHEN Min, YE Jinsheng, LIU Ping. Site Quality Evaluation on Pinus massoniana Based on the Data of National Forest Inventory [J]. FOREST RESOURCES WANAGEMENT, 2020, 0(6): 85-89. |
| [10] | ENG Qilong, CHEN Zhefu, CHEN Duanlv. A Study on the Growth Model of Individual Trees in Natural Mixed Forests of Oak and Pinus Massoniana in Hunan [J]. FOREST RESOURCES WANAGEMENT, 2020, 0(2): 94-102. |
| [11] | Jiangui PENG. Dynamic Analysis on the Effect of Pinus massoniana Plantation Management at Different Growth Stages [J]. FOREST RESOURCES WANAGEMENT, 2020, 0(1): 62-69. |
| [12] | WANG Jinchi, HUANG Ruchu, HUANG Qinglin, MA Zhibo, ZHENG Qunrui, YAN Minghai. A Preliminary Report on the New Growth of Natural Broad-leaved Saplings One Year After the Clear-cutting of Pinus massoniana Plantation [J]. FOREST RESOURCES WANAGEMENT, 2019, 0(6): 115-120. |
| [13] | WANG Xiaoming, LU Yuanchang, XING Haitao, JIA Hongyan, LIU Xianzhao, XIE Yangsheng, Zeng Ji. The Design of the Pinus massoniana-Quercus griffithii Mixed Forest Clear-cutting Silviculture System [J]. FOREST RESOURCES WANAGEMENT, 2017, 0(6): 47-53. |
| [14] | LIU Sihai, ZENG Weisheng. Large-scale Individual Tree Growth Models for Pinus massoniana in China [J]. FOREST RESOURCES WANAGEMENT, 2017, 0(2): 28-33. |
| [15] | LIU Xuehui, WANG Hailong, WEN Xiaorong, LIU Jun, SHE Guanghui, MENG Xue, LI Yun. Study on the Volume Growth Rate Model of Pinus massoniana of Individual Tree and Stand under Different Origins in the Northern Guangxi Province [J]. FOREST RESOURCES WANAGEMENT, 2016, 0(3): 54-60. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 159
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 190
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||